Oprogramowanie realizujące wielozadaniowy system rozproszony między różne jednostki wykonawcze przygotowano w środowisku CPDev [1] (w specjalnej wersji iConfPLC).
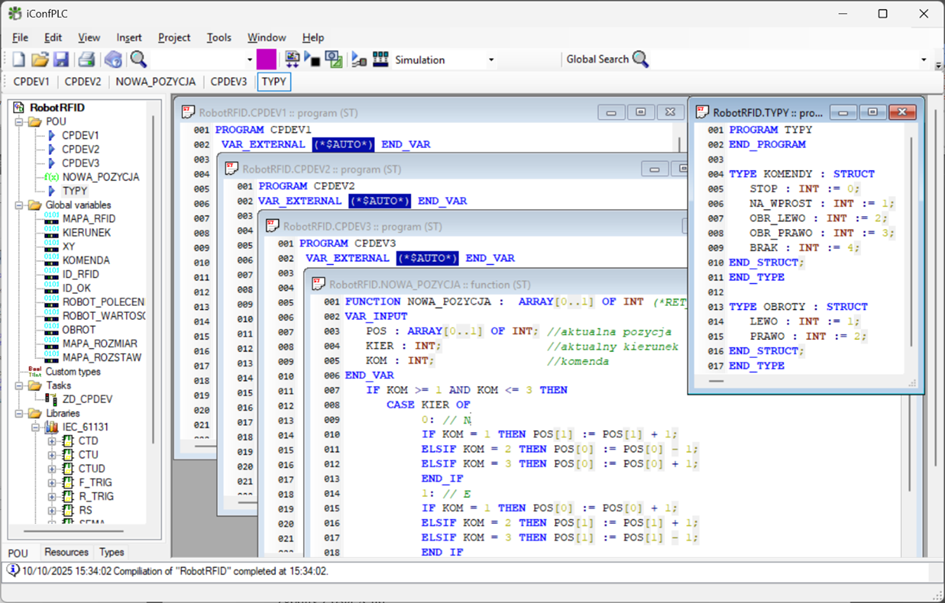
Kody programów CPDEV1, CPDEV2 i CPEV3 wykonywanych przez maszyny wirtualne przedstawiono poniżej. Maszyny te dysponują jednakowymi zmiennymi globalnymi (global variables), z których część wymieniają między sobą.
PROGRAM CPDEV1
VAR_EXTERNAL (*$AUTO*) END_VAR
VAR
ID_OK_TRIG : R_TRIG;
TMP : ARRAY[0..1] OF INT;
KOM : KOMENDY;
X : INT := 0;
Y : INT := 1;
END_VAR
ID_OK_TRIG(CLK:=ID_OK);
IF ID_OK_TRIG.Q THEN
IF KOMENDA = KOM.OBR_LEWO THEN
KIERUNEK := (KIERUNEK + 3) MOD 4;
ELSIF KOMENDA = KOM.OBR_PRAWO THEN
KIERUNEK := (KIERUNEK + 1) MOD 4;
ELSIF KOMENDA = KOM.NA_WPROST THEN
TMP := NOWA_POZYCJA(XY, KIERUNEK,
KOM.NA_WPROST);
XY[X] := TMP[X];
XY[Y] := TMP[Y];
MAPA_RFID[XY[0],XY[1]] := ID_RFID;
ELSIF KOMENDA = KOM.STOP THEN
MAPA_RFID[XY[0],XY[1]] := ID_RFID;
END_IF
END_IF
END_PROGRAM PROGRAM CPDEV2
VAR_EXTERNAL (*$AUTO*) END_VAR
VAR
PUSTE: LWORD := 0;
X : INT := 0;
Y : INT := 1;
KOM : KOMENDY;
OBR : OBROTY;
TMP: ARRAY[0..1] OF INT;
END_VAR
IF MAPA_RFID[XY[X], XY[Y]] <> PUSTE THEN
KOMENDA := KOM.STOP;
TMP := NOWA_POZYCJA(XY, KIERUNEK, KOM.NA_WPROST);
IF (TMP[X] >= 0 AND TMP[X] <= MAPA_ROZMIAR)
AND (TMP[Y] >= 0 AND TMP[Y] <= MAPA_ROZMIAR) THEN
IF MAPA_RFID[TMP[X], TMP[Y]] = PUSTE THEN
KOMENDA := KOM.NA_WPROST; // Na wprost, kierunek bez zmian
END_IF
END_IF
IF KOMENDA = KOM.STOP THEN
IF OBROT = OBR.LEWO THEN
TMP := NOWA_POZYCJA(XY, KIERUNEK, KOM.OBR_LEWO);
IF (TMP[X] >= 0 AND TMP[X] <= MAPA_ROZMIAR)
AND (TMP[Y] >= 0 AND TMP[X] <= MAPA_ROZMIAR) THEN
IF MAPA_RFID[TMP[X], TMP[Y]] = PUSTE THEN
KOMENDA := KOM.OBR_LEWO; // Obrót w lewo w miejscu
END_IF
END_IF
ELSE
TMP := NOWA_POZYCJA(XY, KIERUNEK, KOM.OBR_PRAWO);
IF (TMP[X] >= 0 AND TMP[X] <= MAPA_ROZMIAR)
AND (TMP[Y] >= 0 AND TMP[X] <= MAPA_ROZMIAR) THEN
IF MAPA_RFID[TMP[X], TMP[Y]] = PUSTE THEN
KOMENDA := KOM.OBR_PRAWO; // Obrót w prawo w miejscu
END_IF
END_IF
END_IF
END_IF
END_IF
END_PROGRAM PROGRAM CPDEV3
VAR_EXTERNAL (*$AUTO*) END_VAR
VAR
KOM : KOMENDY;
ID_OK_TRIG : F_TRIG;
END_VAR
ID_OK_TRIG(CLK:=ID_OK);
IF ID_OK_TRIG.Q THEN
IF KOMENDA = KOM.NA_WPROST THEN
ROBOT_POLECENIE := 1;
ROBOT_WARTOSC := MAPA_ROZSTAW;
ELSIF KOMENDA = KOM.OBR_LEWO THEN
ROBOT_POLECENIE := 2;
ROBOT_WARTOSC := 90;
ELSIF KOMENDA = KOM.OBR_PRAWO THEN
ROBOT_POLECENIE := 3;
ROBOT_WARTOSC := -90;
ELSE
ROBOT_POLECENIE := 0;
END_IF
END_IF
END_PROGRAM Do uzupełnienia projektu opracowano specjalny pusty program TYPY przechowujący własne typy zmiennych oraz funkcję NOWA_POZYCJA implementującą wyszukiwanie nowej pozycji będącej bazą eksploracji.
PROGRAM TYPY
END_PROGRAM
TYPE KOMENDY : STRUCT
STOP : INT := 0;
NA_WPROST : INT := 1;
OBR_LEWO : INT := 2;
OBR_PRAWO : INT := 3;
BRAK : INT := 4;
END_STRUCT;
END_TYPE
TYPE OBROTY : STRUCT
LEWO : INT := 1;
PRAWO : INT := 2;
END_STRUCT;
END_TYPEFUNCTION NOWA_POZYCJA : ARRAY[0..1] OF INT (*RET_TYPE*)
VAR_INPUT
POS : ARRAY[0..1] OF INT; //aktualna pozycja
KIER : INT; //aktualny kierunek
KOM : INT; //komenda
END_VAR
IF KOM >= 1 AND KOM <= 3 THEN
CASE KIER OF
0: // N
IF KOM = 1 THEN POS[1] := POS[1] + 1;
ELSIF KOM = 2 THEN POS[0] := POS[0] - 1;
ELSIF KOM = 3 THEN POS[0] := POS[0] + 1;
END_IF
1: // E
IF KOM = 1 THEN POS[0] := POS[0] + 1;
ELSIF KOM = 2 THEN POS[1] := POS[1] + 1;
ELSIF KOM = 3 THEN POS[1] := POS[1] - 1;
END_IF
2: //S
IF KOM = 1 THEN POS[1] := POS[1] - 1;
ELSIF KOM = 2 THEN POS[0] := POS[0] + 1;
ELSIF KOM = 3 THEN POS[0] := POS[0] - 1;
END_IF
3: // W
IF KOM = 1 THEN POS[0] := POS[0] - 1;
ELSIF KOM = 2 THEN POS[1] := POS[1] - 1;
ELSIF KOM = 3 THEN POS[1] := POS[1] + 1;
END_IF
END_CASE
END_IF
NOWA_POZYCJA := POS; (*RET_VALUE*)
END_FUNCTION