Konstrukcja robota mobilnego WAVE ROVER
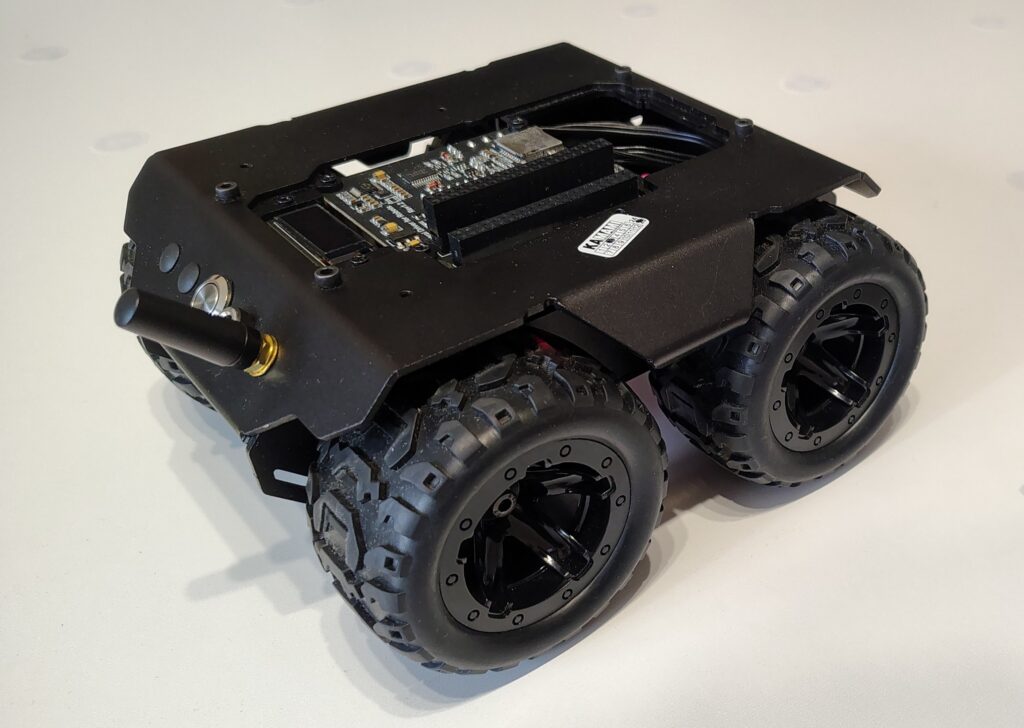
W części sprzętowej projektu jako bazę mechaniczną wykorzystano platformę Wave Rover firmy Waveshare. Jest to robot mobilny o konstrukcji modułowej, przystosowany do rozbudowy o zewnętrzne komputery jednopłytkowe oraz sensorykę. Poniżej przedstawiono szczegóły techniczne konstrukcji oraz modyfikacje wprowadzone na potrzeby realizacji projektu eksploracji pola RFID.
Budowa mechaniczna i układ jezdny
Konstrukcja robota opiera się na wytrzymałym, aluminiowym korpusie zapewniającym sztywność oraz ochronę wewnętrznych podzespołów elektronicznych.
- Układ napędowy — zastosowano napęd oparty na czterech kołach, każde napędzane silnikiem prądu stałego (DC)
z metalową przekładnią redukcyjną. Koła zostały sprzęgnięte elektrycznie w pary (lewa i prawa strona) i podłączone do niezależnych kanałów mostka H. - Koła napędowe — robot wyposażony jest w elastyczne gumowe opony, które minimalizują wstrząsy przenoszone
na elektronikę sterującą oraz poprawiają przyczepność na nierównym podłożu.
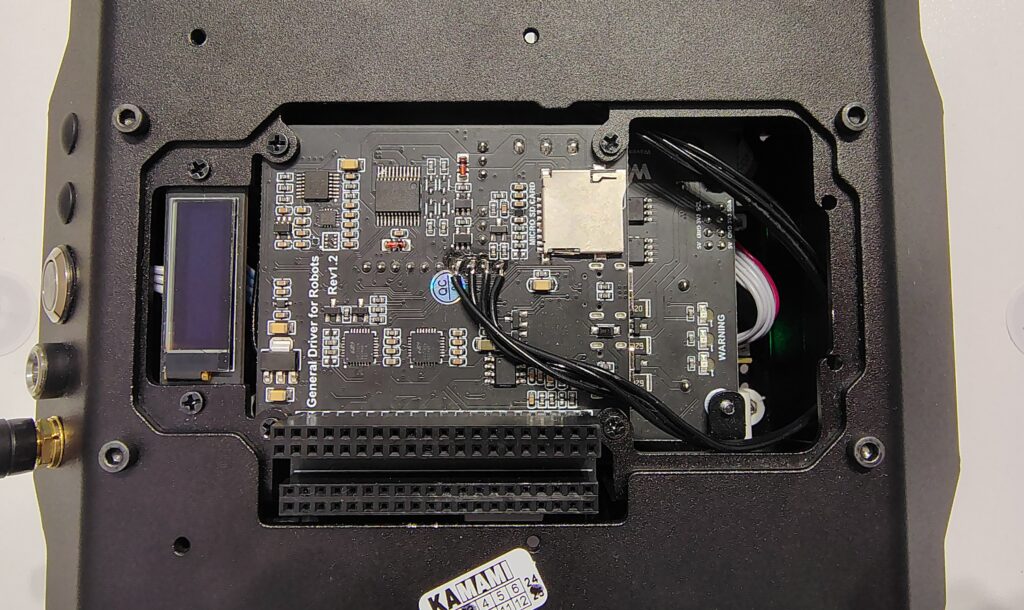
Modyfikacje i integracja elektroniki
Standardowa platforma Wave Rover została przystosowana do specyficznych wymagań projektu związanych z systemem identyfikacji RFID.
1. Modernizacja sterowania napędem
W ramach implementacji laboratoryjnej zrezygnowano z fabrycznego oprogramowania sterującego silnikami. Zamiast standardowego sterowania otwartego, w mikrokontrolerze ESP32 zaimplementowano własne algorytmy regulacji:
- Regulatory PID — odpowiadają za stabilizację prędkości obrotowej kół w fazie jazdy na wprost kompensując różnice charakterystyk poszczególnych silników.
- Sterowanie bang-bang — wykorzystywane w fazie obrotu
ze względu na nieprzyjazną dynamikę konstrukcji – obrót realizowany poprzez napęd różnicowy. Pozwoliło to na zwiększenie precyzji obrotu robota po siatce kwadratowej,
co jest kluczowe przy braku zewnętrznego systemu pozycjonowania (GNSS).
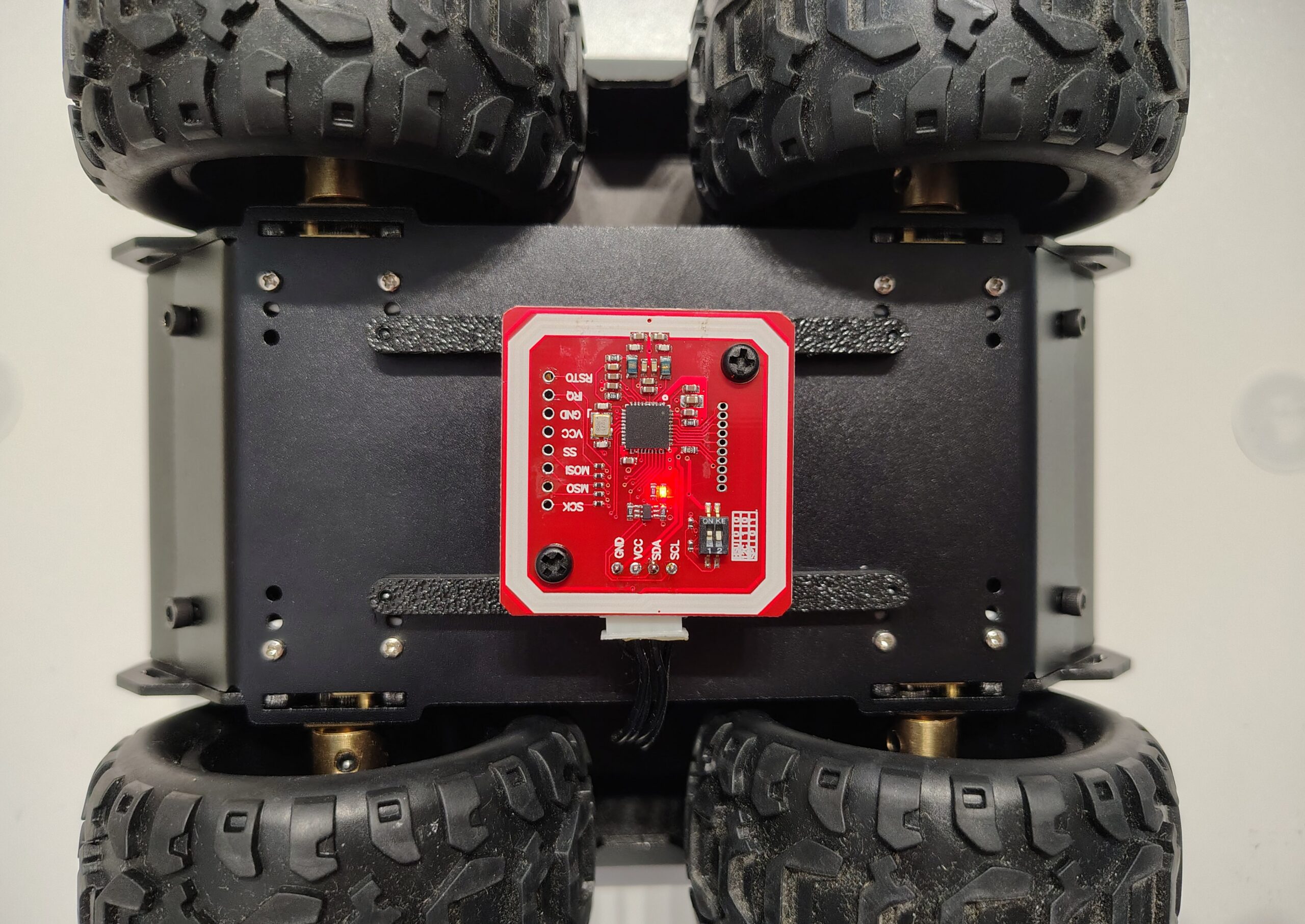
2. Moduł czytnika RFID
W dolnej części konstrukcji, w bezpośrednim sąsiedztwie podłoża, zamontowano czytnik RFID. Jego umiejscowienie zostało dobrane tak, aby maksymalizować zasięg odczytu pasywnych znaczników RFID rozmieszczonych na płycie testowej, przy jednoczesnym zachowaniu prześwitu niezbędnego do poruszania się.